

系統概述
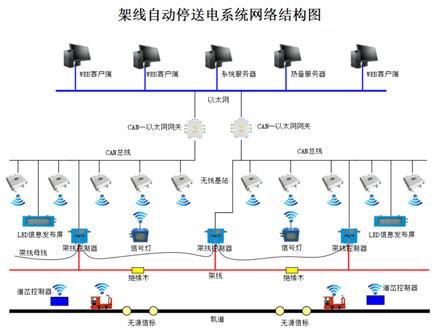
本系統上位機軟件采用B/S構架,可以實現多WEB客戶端應用。硬件采用CAN總線和以太網作爲傳輸層進行通信,現場CAN總線連接的所有無線基站(無線網關)到CAN-以太網網關,然後接入上位機所在的工(gōng)業以太網。其他所有現場設備都是通過無線自組織網絡和無線基站通信。無線車(chē)載機作爲移動設備可以快速在無線基站間數據漫遊。現場道岔控制器和信号燈等非移動設備都可以作爲無線路由中(zhōng)繼對無線數據進行路由,大(dà)量減少了設備使用量,減少了用戶投資(zī)。
系統是用于惡劣環境的分(fēn)布式工(gōng)業控制系統,系統以工(gōng)控機爲控制核心,在主控室對井下(xià)的架線電機車(chē)運輸實現實時監控和自動調度。主要是控制架線區段内有車(chē)有電無車(chē)無電目的。大(dà)大(dà)降低人員(yuán)觸電事故的發生(shēng),并能實時顯示井下(xià)各架線段停送電狀态、各機車(chē)位置、車(chē)号及信号燈、區段占用情況,自動實現敵對進路的閉鎖,不允許敵對信号同時開(kāi)放(fàng),保障機車(chē)安全運行。系統能随時反映設備和傳感器的工(gōng)作狀态;故障自動診斷、報警,記錄運行過程數據,具有報警、自動記錄運行過程數據報表打印等功能。監控系統能實現岔位信号上傳并實現道岔的集中(zhōng)監視和控制,同時實現機車(chē)車(chē)載按鍵遙控控制架線和道岔的功能。巷道硐室配一(yī)台服務器電腦,在井上調度室設置一(yī)台客戶端電腦作爲監視觀看和操作調度。

實現功能
1、自動停送電功能:
每個架線段的架線控制器通過接收CAN總線網絡傳輸的無線車(chē)載機的數據分(fēn)析機車(chē)位置,如果條件成立就自動控制本架線段上電,如果沒有需要的無線車(chē)載機數據且也沒有其他機車(chē)在本架線段運行,就延時10秒左右自動斷電。
2、 遙控上電功能:
如果機車(chē)行走到一(yī)個新的區段沒有實現自動上電,司機可以通過按動無線車(chē)載機的鍵盤,主動請求讓本區段的架線控制器上電,實現遙控上電功能。
3、 遠程架線段監控與遠程上電功能:
CAN網絡通過通信接口接入上位機後,在軟件界面上可以實時監控所有架線段的上電和斷電過程,并可以通過電腦軟件界面遠程控制架線段上電或者斷電。
4、機車(chē)精确定位功能:
每輛機車(chē)上的車(chē)載機平時采集自身位置數據通過無線方式發送到CAN總線,上位機通過通信接口設備采集每輛機車(chē)發送的位置數據進行分(fēn)析,實時在軟件界面上顯示機車(chē)的精确位置。定位精度可達1米内。
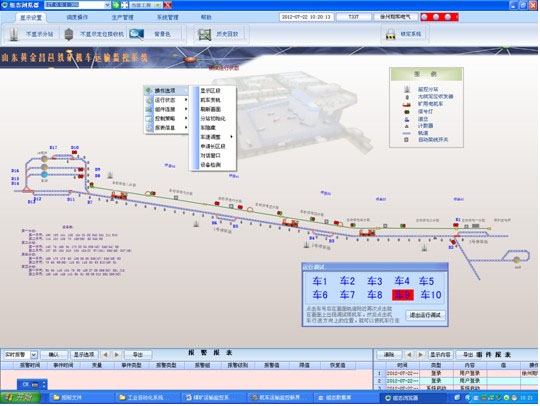
5、可視化監視功能:
在計算機上以動畫、圖形、表格、漢字等形式實時顯示各架線段上電狀态、機車(chē)位置、車(chē)号、運行方向、以及井下(xià)各道岔位置和信号燈等運行狀态信息。
6、信号閉鎖功能:
系統根據機車(chē)位置,自動、半自動或手動控制信号燈進行敵對進來信号閉鎖,指揮機車(chē)運行,有效防止碰撞事故發生(shēng),提高運輸效率。
7、電氣閉鎖功能:
調度員(yuán)可以遠程對架線電壓遠程關閉(電氣閉鎖)更可靠地指揮機車(chē)運行。電器閉鎖時,現場無法自動上電。
8、智能調度功能:
全自動調度模式:在全自動調度模式下(xià),調度模塊根據運輸計劃預先設定的運輸線路選擇需要的線路給機車(chē)。軟件具有行程進路自動沖突檢測功能,實現自動調度控制功能。
手動調度模式:進入手動調度狀态後,調度員(yuán)可以遠程控制道岔、信号燈來開(kāi)放(fàng)或閉鎖運輸路線,實現遠程手動調度功能。
9、語音調度功能:
車(chē)載機和上位機在整個調度過程中(zhōng)會通過特定的語音來進行語音提示。如:機車(chē)詢問時上位機會在顯示機車(chē)詢問文本信息的同時進行發音;上位機發送給某個機車(chē)調度信息時,車(chē)載機會對此信息進行語音播放(fàng);跟車(chē)工(gōng)采用發射器與車(chē)載機聯絡,車(chē)載機收到信号後會發出語音提示。
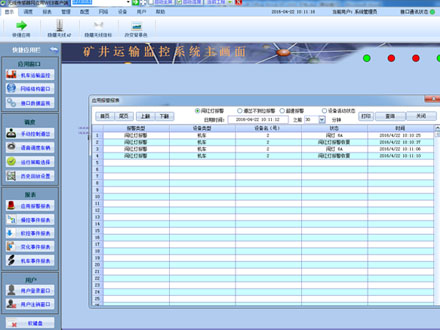
10、系統報警功能:
上位機可實現闖紅燈報警、道岔不到位報警及設備故障報警等功能,以圖形提示報警并可進行報警報表查詢。
11、車(chē)聯網報警和遙控功能:
車(chē)載機與其他設備配合,不通過上位機就可以實現各種語音報警功能。如:車(chē)載機與其他列車(chē)尾部的無線尾燈配合實現防追尾功能;車(chē)載機與本列車(chē)尾燈配合實現防丢車(chē)功能;車(chē)載機與速度傳感器配合實現防超速功能;車(chē)載機與跟車(chē)工(gōng)手持發射器配合實現打點報警功能;車(chē)載機與人車(chē)場聲光報警器配合實現人車(chē)報站功能;車(chē)載機與彎道報警器配合實現彎道報警功能;車(chē)載機遙控控制道岔翻轉功能;雙駕駛室機車(chē)每個駕駛室都安裝一(yī)台車(chē)載機,兩台車(chē)載機通過總線聯網後,司機操作任一(yī)台車(chē)載機都可以實現所有車(chē)載機功能。
12、遠程控制功能:
系統軟件可以下(xià)發命令到自動停送電開(kāi)關、信号燈、道岔等。對自動停送點開(kāi)關、司控道岔具有遠程集中(zhōng)控制、司機遙控、手動控制方式。
1)集中(zhōng)控制:是由調度員(yuán)在地面集控中(zhōng)心的主控微機的圖形上通過鼠标控制架線上電或控制司控道岔翻轉;
2)司機遙控:爲機車(chē)司機使用駕駛室的車(chē)載機遠距離(lí)遙控自動停送電開(kāi)關或司控道岔動作;
3) 手動控制:現場軟硬可以就地操作自動停送電開(kāi)關或者司控道岔動作。
13、全系統後備電源功能:
整個系統中(zhōng)的所有設備的供電電壓都具備後備不間斷電源功能,當有局部區域交流斷電或全部交流斷電時,後備電源都會立即啓動,不影響系統運行。後備電池供電時間不低于2小(xiǎo)時,電池充放(fàng)電500次後容量不低于80%。
14、信息管理功能:
可以對機進行自動統計管理,有行車(chē)記錄及圖表,并能生(shēng)成各種生(shēng)産管理報表。
15、用戶管理功能:
系統軟件具有用戶配置和管理功能,高級用戶可以對低級别用戶進行配置。不同級别用戶可以設置對應級别的操作權限。
16、重演功能:
能全天候24 小(xiǎo)時實時記錄系統運行情況,并能根據記錄的運行數據在顯示設備上重演規定時間内的實際運行過程,爲分(fēn)析事故原因、改進調度策略提供根據,記錄存儲時間爲一(yī)年以上。
17、故障診斷與維護功能:
系統能随時反應系統設備和傳感器的工(gōng)作狀态,能自動進行本系統的故障診斷并完成報警。
18、雙機備份功能:
上位機可采用主備雙系統結構,确保系統運行的安全可靠性,當任一(yī)台發生(shēng)故障時,另一(yī)台備用機可以起到主機的監控作用。其中(zhōng)一(yī)台可兼作爲工(gōng)程師站,允許遠程編輯、調整設備的運行狀态和運行參數。
19、集成聯網功能:
系統具有OPC軟件功能,能平滑地接入自動化集中(zhōng)控制信息平台,可直接采用IE浏覽器浏覽本系統的監控畫面。
20、 其他功能:
各硬件設備、系統線路自檢功能的查詢,曆史數據的顯示、查詢、報表、打印等等。
21、視頻(pín)監控擴展功能:
如果井下(xià)關鍵路口或停車(chē)場安裝本公司網絡攝像儀,可實現以系統模拟圖爲地理信息的視頻(pín)監控功能。隻要在本系統軟件主畫面中(zhōng)點擊需要查看的攝像儀圖标,就可以打開(kāi)此攝像儀的視頻(pín)畫面。或者自動彈出機車(chē)運行位置的視頻(pín)圖像。
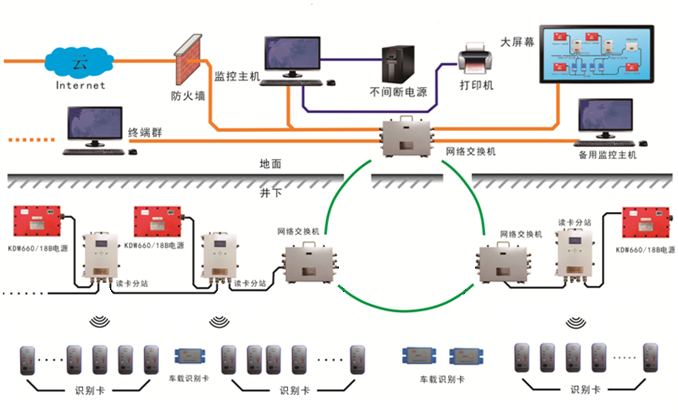
22、車(chē)皮定位管理選擴展能:
如果在關鍵軌道路口安裝車(chē)輛管理讀卡器,在每個車(chē)輛上安裝車(chē)皮信标,系統軟件可按位置、車(chē)号、車(chē)皮号、車(chē)皮類型、時間、等方式進行車(chē)皮定位和車(chē)皮數據查詢;生(shēng)成運輸生(shēng)産報表;實時監控機車(chē)所帶載車(chē)皮信息。
23.、LED屏信息發布選配功能:
如果井下(xià)關鍵路口或停車(chē)場接入本公司LED信息發布屏到系統總線,上位機軟件可發布信息到LED屏。在系統軟件的信息發布界面輸入任何文字,就可以讓井下(xià)任何一(yī)個LED屏顯示想要的信息,顯示的同時還可同步發語音。上位機根據系統狀态可自動發送信息到某個LED屏。更好的實現系統與井下(xià)人員(yuán)的信息交流。
24、無人駕駛調度擴展功能:
系統具有精确的機車(chē)定位及軌道識别能力,具有自動冗餘的總線帶寬适應性和快速響應能力,加上基于科學算法的智能調度模塊,爲後續無人駕駛調度功能擴展打下(xià)堅實的基礎。車(chē)載設備之間采用總線進行通信,具有串行擴展接口,将來隻要在每台變頻(pín)機車(chē)上增加無人駕駛硬件模塊接入總線,無人駕駛硬件模塊又(yòu)通過專用接口與變頻(pín)器通信就可以控制機車(chē)運行,不需要再增加其他硬件設備就可以實現無人駕駛運輸調度系統(遠程遙控駕駛或全自動無人自動駕駛),因此本系統具有後續的無人駕駛系統無縫擴展能力,并能有效減少二次投資(zī)。

咨詢電話(huà):
 掃一(yī)掃咨詢微信客服
掃一(yī)掃咨詢微信客服

管理員(yuán)
該内容暫無評論